Sản phẩm gợi ý
Hotline: 0936.336.128
Sản phẩm gợi ý
Hotline: 0936.336.128

Thông tin sản phẩm




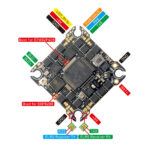
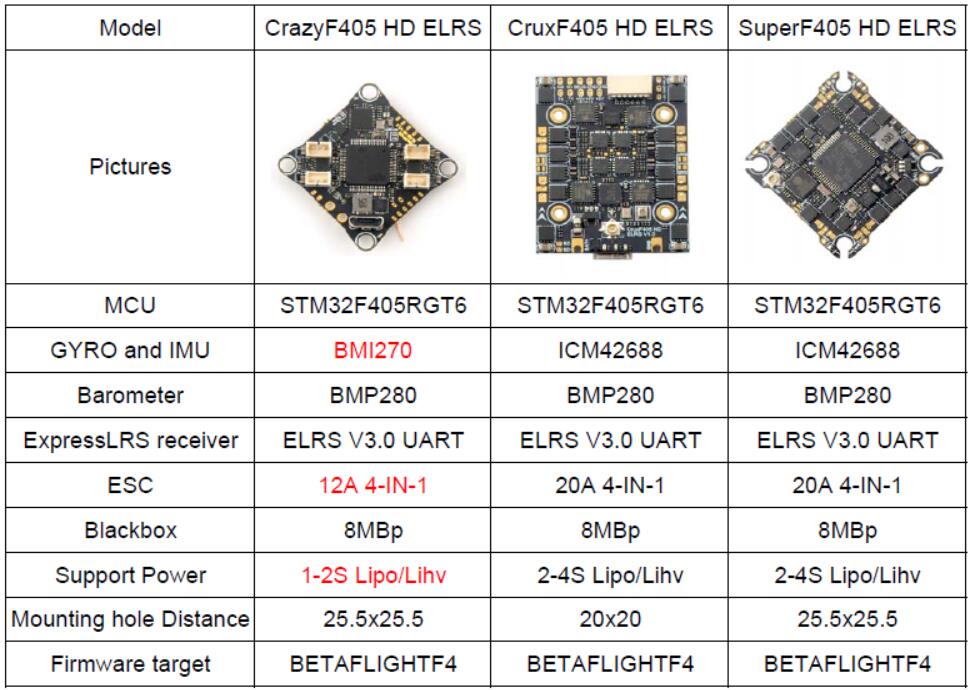
Máy điều khiển chuyến bay Super F405HD ELRS AIO đi kèm với bộ thu ExpressLRS 2.4GHz tích hợp và ESC Blheli_s 20A (có sẵn firmware Bluejay) có thể hỗ trợ pin 2-4s. Mosfet lớn hơn có thể hỗ trợ dòng điện lên đến 20A và có sẵn vị trí cắm 6 chân cho thiết bị DJI HD cắm và chạy. Đây là một giải pháp tuyệt vời để xây dựng HD digital FPV whoop 2-4S.
Thông số kỹ thuật:
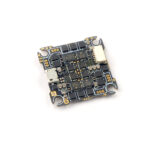
| Máy điều khiển chuyến bay | MCU: STM32F405RGT6 (168MHZ, 1Mbyte FLASH) Cảm biến GYRO: ICM42688 (kết nối SPI) Kích thước lỗ gắn: 25mm*25mm Nguồn cung cấp: đầu vào pin 2~4S (DC 8.7V-17.4V) Có sẵn 20A (mỗi) Blheli_S 4in1 ESC Có sẵn Serial ExpressLRS 2.4G (mặc định kết nối với UART2) Có sẵn BMP280 Barometer Có sẵn blackbox 8MBp Có sẵn cảm biến voltmeter, thang đo voltmeter 110 Có sẵn cảm biến ammeter, thang đo ammeter 470 Firmware target của máy điều khiển chuyến bay: BETAFLIGHTF4 |
| ESC 4in1 trên bo mạch | MCU được nâng cấp lên EFM8BB21 Nguồn cung cấp: 2-4S LiPo/LiPo HV (7v/17v) Dòng điện: 20A liên tục, cực đại 25A (5 giây) Hỗ trợ lập trình BLHeliSuite Firmware nhà máy: Bluejay 0.19.2 Firmware target: F_H_40_48_v0.19.2 Giao thức mặc định: DSHOT150/DSHOT300/DSHOT600 |
| Bộ thu ExpressLRS 2.4GHz trên bo mạch | Tùy chọn Tần số Gói: 25Hz/50Hz/150Hz/250Hz/500Hz Tần số RF: 2.4GHz Antenna plug: IPEX Công suất đầu ra telemetry: <12dBm Giao thức thu: CRSF Phiên bản firmware mặc định: ExpressLRS V3.0.1 |
| Cài đặt voltmeter và ammeter trên bo mạch | Cài đặt thang đo voltmeter 110 Cài đặt thang đo ammeter 470 |
Quy trình liên kết:
Ý nghĩa trạng thái đèn LED của bộ thu:
Đèn LED đỏ sáng có nghĩa là liên kết thành công hoặc kết nối RC được thiết lập; Đèn LED đỏ nhấp nháy đôi có nghĩa là vào chế độ liên kết; Đèn LED đỏ nhấp nháy chậm có nghĩa là không có tín hiệu RC đầu vào từ mô-đun TX; Đèn LED đỏ nhấp nháy liên tục nhanh có nghĩa là wifi ExpressLRS đã được kích hoạt; Đèn LED đỏ nhấp nháy ba lần có nghĩa là không trùng khớp mô hình cần thay đổi mô hình từ "off" sang "on".
Mô tả UART:
Bộ thu ELRS đã được kết nối với UART2 mặc định ra khỏi nhà máy.
Thường thì UART1 được sử dụng cho MSP OSD với HD VTX.
UART6 có thể được sử dụng cho GPS hoặc các thiết bị nối tiếp khác.
IRX6 là một serial RX6 đảo ngược cho đầu vào SBUS.
IRX6 và TX6/RX6 không thể được sử dụng đồng thời.
GHI CHÚ:
Nếu nâng cấp firmware lên betaflight 4.4.x, cần thêm định nghĩa tùy chỉnh “GYRO_SPI_ICM42688P ACC_SPI_ICM42688P” từ cấu hình xây dựng của betaflight configurator nếu không thì gyro sẽ không hoạt động. 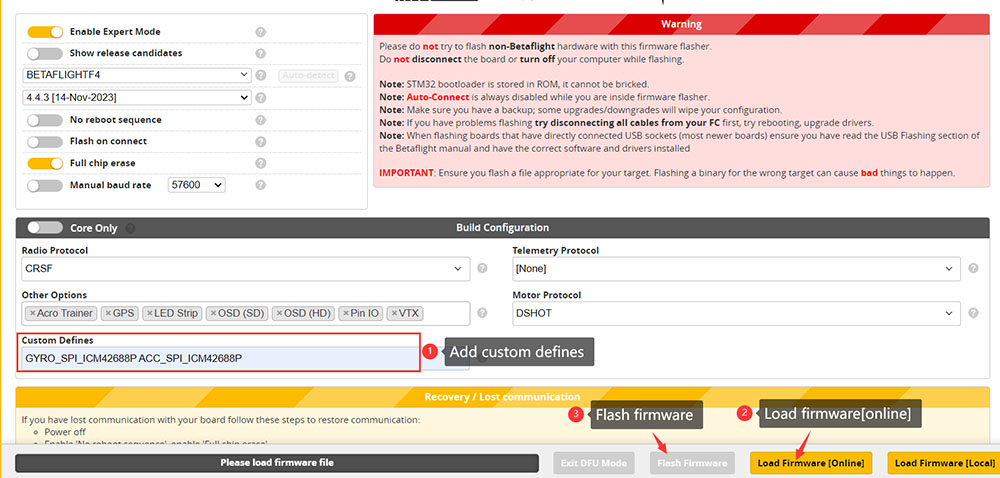
Nếu bạn muốn kích hoạt Barometer, xin vui lòng kết nối với betaflight configurator và vào lệnh CLI, sau đó gõ lệnh sau:
resource I2C_SCL 2 B10
resource I2C_SDA 2 B11
set baro_bustype = I2C
set baro_i2c_device = 2
save
Cài đặt cổng mặc định:

Nếu bạn muốn sử dụng Bộ Điều Khiển Radio DJI, vui lòng thay đổi sang các cài đặt sau:



Sản phẩm liên quan

2,890,000VNĐ

Tháp Mạch SpeedyBee F7 V3 + Điều Tốc BL32 50A 30x30
2,490,000VNĐ

MicoAir MT-06 Laser rangefinder (6m)
250,000VNĐ

MicoAir MT-15 Laser rangefinder (15m)
500,000VNĐ

Tháp Mạch Micoair H743 V2 Am32 70A
2,470,000VNĐ
Tháp Mạch Micoair H743 V2 Am32 55A
1,950,000VNĐ


Đánh giá nhận xét