Sản phẩm gợi ý
Hotline: 0936.336.128
Sản phẩm gợi ý
Hotline: 0936.336.128

Thaituan-hobby (1 sp)
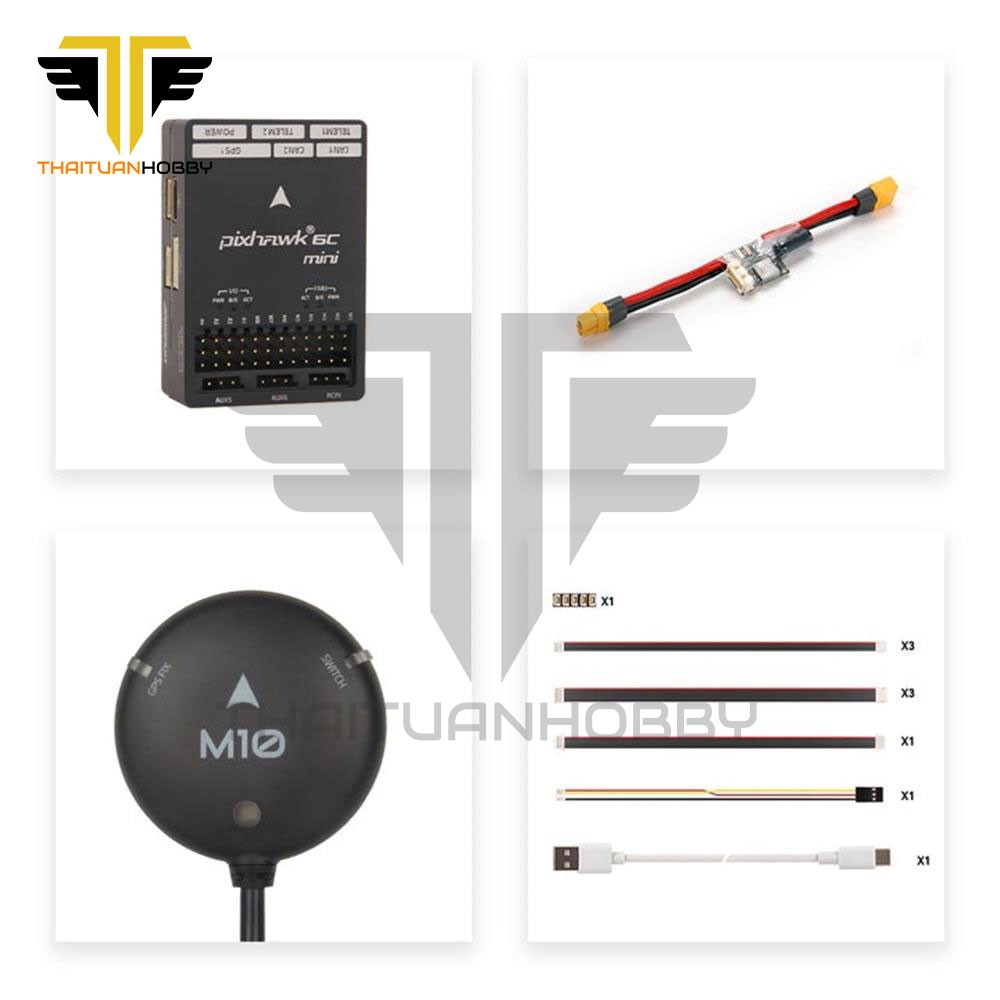
Thông tin sản phẩm
Thiết kế cách ly rung động mới này sử dụng vật liệu cách ly bền tùy chỉnh như Pixhawk 6X Pro, thay vì thiết kế bọt truyền thống. R&D và kiểm tra rộng rãi mang đến đặc điểm giảm xóc IMU tối ưu với tần số cộng hưởng trong phổ cao, hoàn hảo cho dòng drone công nghiệp và thương mại.

Sản phẩm liên quan

Holybro Pixhawk 4(Aluminum) + PM02 12S + M9N GPS Set
5,350,000VNĐ

Holybro Pixhawk 4(plastic case)&PM02 12S Set
3,690,000VNĐ
Mạch Bay Happymodel CrazyF405HD 12a ELRS 1-2S AIO
1,370,000VNĐ
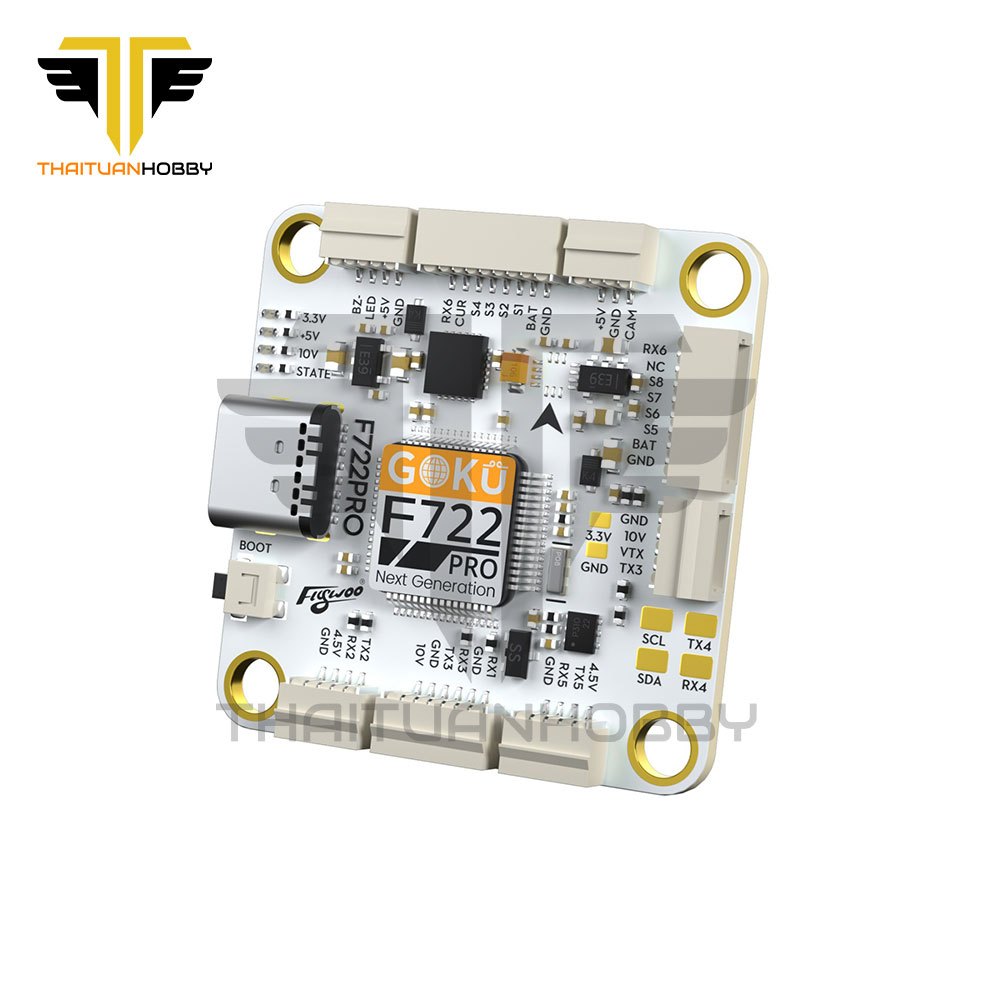
Mạch Bay Flywoo Goku F722 Pro V2 30X30 ICM42688
1,000,000VNĐ
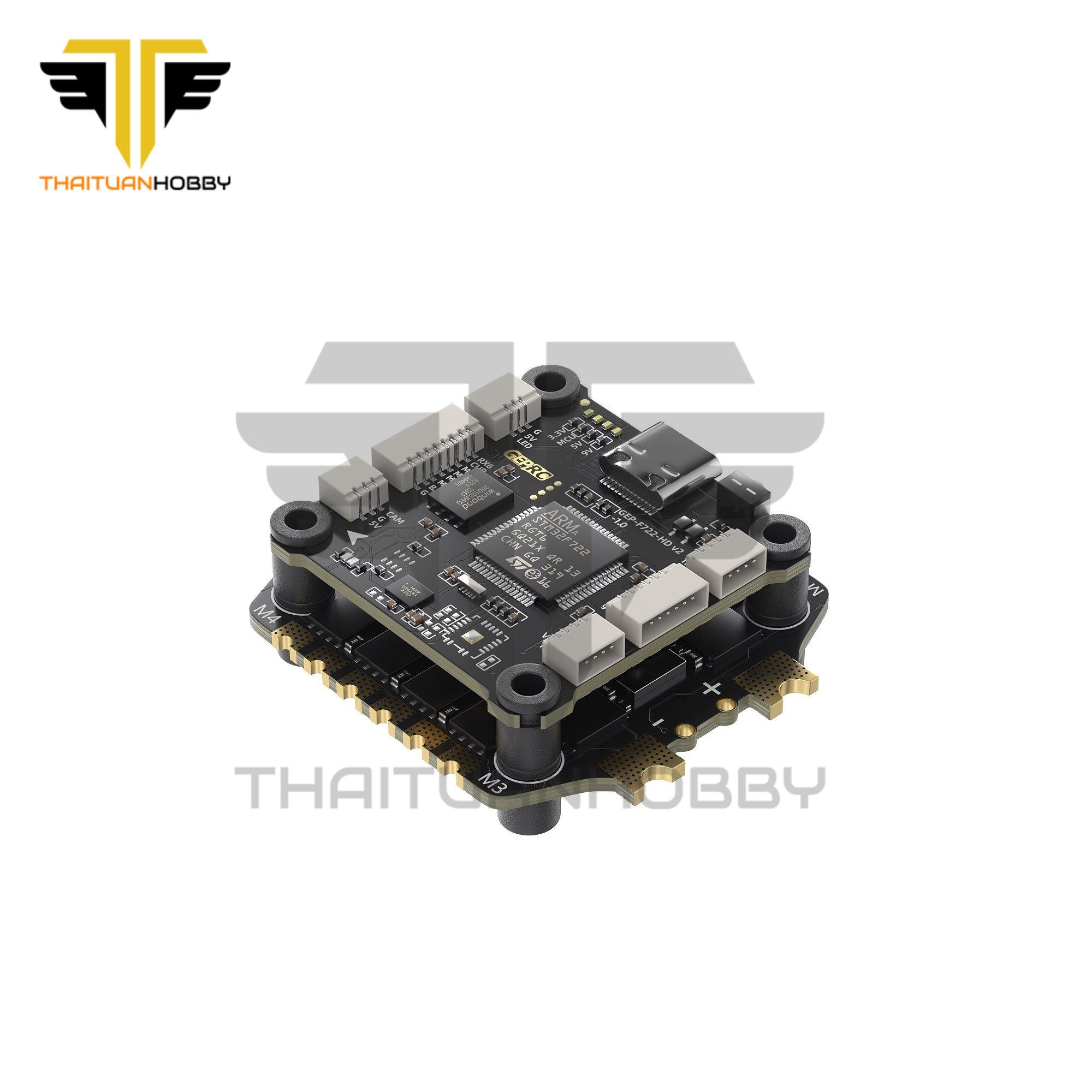
Tháp Mạch GEPRC TAKER F722 BLS 65A V2
1,920,000VNĐ

Tháp Mạch GEPRC TAKER F745 BT 8Bit 60A
1,950,000VNĐ
Đánh giá nhận xét