Sản phẩm gợi ý
Hotline: 0936.336.128
Sản phẩm gợi ý
Hotline: 0936.336.128

Thaituan-hobby (2 sp)
Thông tin sản phẩm
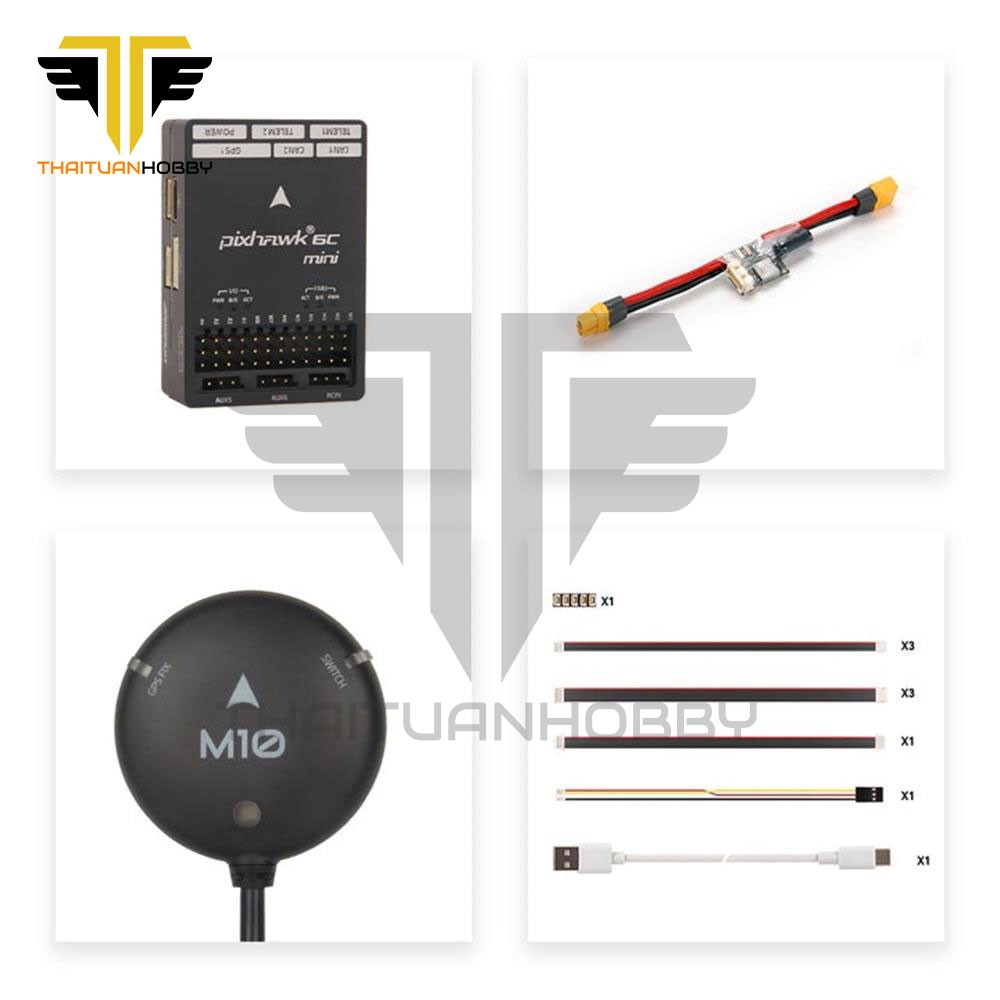
Thiết kế chống rung mới này sử dụng cùng một vật liệu cách ly bền bỉ theo công thức tùy chỉnh như Pixhawk 6X Pro, thay vì thiết kế xốp truyền thống. Được hỗ trợ bởi nghiên cứu và thử nghiệm rộng rãi, nó cung cấp đặc tính giảm chấn IMU tối ưu với tần số cộng hưởng trong quang phổ cao hơn, hoàn hảo cho drone công nghiệp và thương mại







Lưu ý:
Vi xử lý & Cảm biến
Dữ liệu điện
Dữ liệu cơ khí
SKU 11073 bao gồm:
SKU 20293/SKU 20300/SKU20313 bao gồm:

Sản phẩm liên quan

MicoAir MT-06 Laser rangefinder (6m)
250,000VNĐ

MicoAir MT-15 Laser rangefinder (15m)
500,000VNĐ
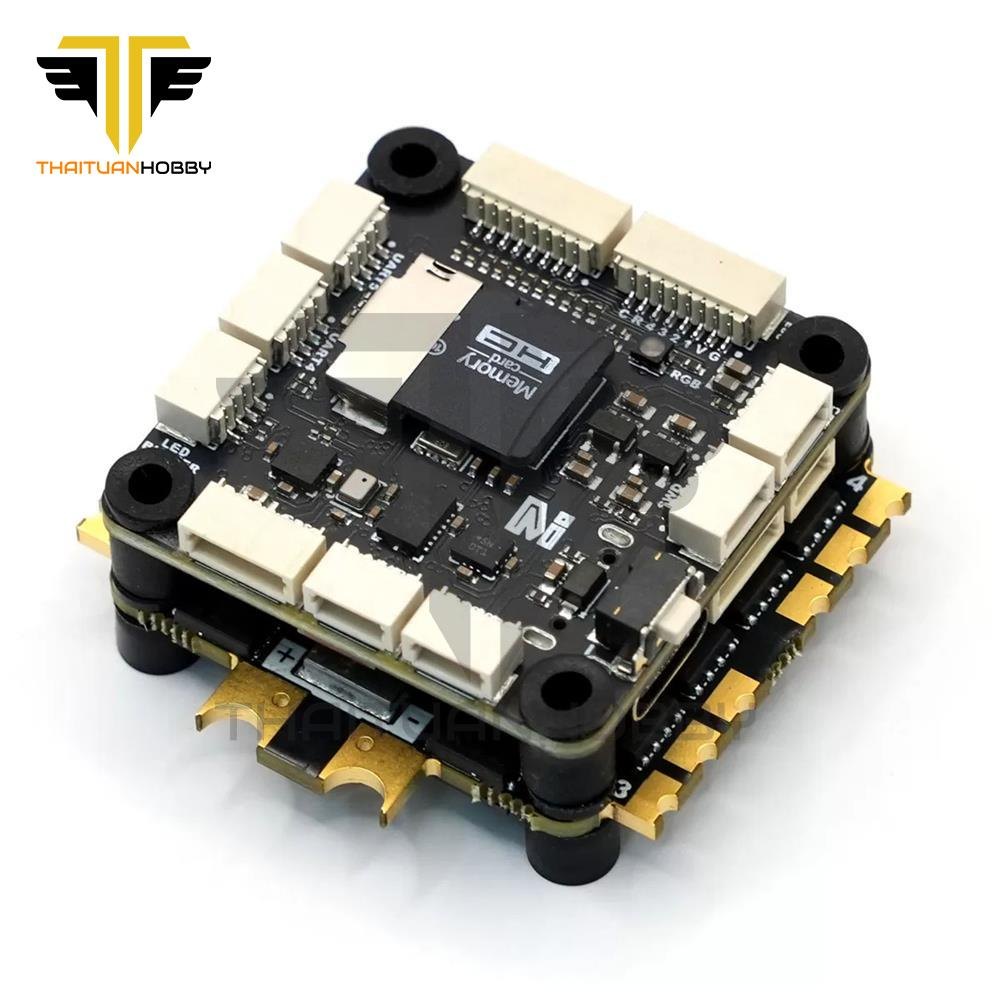
Tháp Mạch Micoair H743 V2 Am32 70A
2,470,000VNĐ
Tháp Mạch Micoair H743 V2 Am32 55A
1,950,000VNĐ

Holybro Pixhawk 4(Aluminum) + PM02 12S + M9N GPS Set
5,350,000VNĐ


Đánh giá nhận xét